專題報(bào)道 | 智能機(jī)器人:繩驅(qū)模塊化變關(guān)節(jié)機(jī)械手
在“柔性咽喉手術(shù)機(jī)器人”以及“軟軸驅(qū)動的柔性機(jī)械手”兩篇中,我們了解到機(jī)械手一方面可以代替人類完成準(zhǔn)確抓取、精細(xì)操作,另一方面可以在危險(xiǎn)、復(fù)雜及非機(jī)構(gòu)化的環(huán)境中工作,可以在工業(yè)生產(chǎn)、物流分揀、家庭服務(wù)及科學(xué)探索等領(lǐng)域發(fā)揮重要作用。為了實(shí)現(xiàn)抓取操作的多樣性,機(jī)械手對于驅(qū)動方式和形狀有較高的要求。
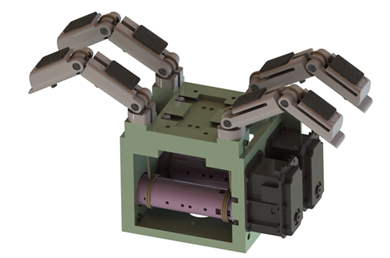
新加坡國立大學(xué)蘇州研究院任洪亮教授課題組的李長勝博士和博士生顧曉藝設(shè)計(jì)的繩驅(qū)模塊化機(jī)械手
最傳統(tǒng)的方式是把電機(jī)安裝于關(guān)節(jié)位置,直接驅(qū)動機(jī)械手的運(yùn)動,這種電機(jī)直接驅(qū)動的方式可以實(shí)現(xiàn)較好的控制性能,但由于機(jī)械手非常笨重,極大地限制了它的適用范圍;基于繩驅(qū)的驅(qū)動方式可以使驅(qū)動部分脫離機(jī)械手本體,有效地減小機(jī)械手的體積,但是這些機(jī)械手具有固定的形狀,難以勝任形狀差異很大的目標(biāo)物的抓取。此設(shè)計(jì)創(chuàng)新性地把模塊化思想和變關(guān)節(jié)技術(shù)引入了機(jī)械手的設(shè)計(jì),解決了模塊之間的連接與配合、連接可靠性等問題,并設(shè)計(jì)研發(fā)了兩款機(jī)械手,解決了上述的問題。

第一款機(jī)械手

第二款機(jī)械手
第一款機(jī)械手,手指由精心設(shè)計(jì)的模塊相互連接而成,舊的模塊能夠很方便地被新的模塊替代,模塊的數(shù)量也可以任意地增加或者減少,從而適用于不同的抓取任務(wù)。不僅如此,每個(gè)關(guān)節(jié)都能夠主動地被鎖止。機(jī)械手可以構(gòu)成不同的形狀完成特定的任務(wù)。不僅如此,研究者研發(fā)了一套智能控制算法,當(dāng)機(jī)械手的模塊與目標(biāo)物完全貼合后,相應(yīng)的關(guān)節(jié)會自動鎖止,當(dāng)手指與目標(biāo)物完全貼合后,不需要額外的驅(qū)動力,機(jī)械手就能夠?qū)崿F(xiàn)抓取功能。因此可變關(guān)節(jié)技術(shù)不僅實(shí)現(xiàn)了機(jī)械手結(jié)構(gòu)的多樣化,提高了抓取能力,而且可以有效地保護(hù)驅(qū)動器,延長驅(qū)動器的使用壽命,降低了使用成本。
機(jī)械手可輕松抓起體積大且形狀不規(guī)則的物體
第二款機(jī)械手同樣采用了模塊化的設(shè)計(jì)方法,不僅手指上的模塊之間可以相互連接配合,手指與底座之間也采用了相同的連接配合技術(shù)。因此,通過調(diào)整手指的模塊數(shù)量及調(diào)整手指在底座上的位置,可以實(shí)現(xiàn)對機(jī)械手工作空間和剛度的調(diào)整,從而使機(jī)械手的適用領(lǐng)域更廣,抓取性能更好。不僅如此,此設(shè)計(jì)中的機(jī)械手在人機(jī)交互安全性及操作工具等方面也展示出了優(yōu)越的性能。
機(jī)械手能夠智能地識別目標(biāo)物并施加合適的抓取力進(jìn)行抓取易碎、表面光滑、脆弱的物體
得益于模塊化和變關(guān)節(jié)這兩個(gè)核心技術(shù),此設(shè)計(jì)中的兩款機(jī)械手的工作空間,形狀和剛度都可重構(gòu),使它具有高度的靈活性和高的柔順性,結(jié)合它的智能感知能力和自適應(yīng)能力,本設(shè)計(jì)中的機(jī)械手的抓取能力更強(qiáng),適用范圍更廣。同時(shí),它的結(jié)構(gòu)更簡單,用3D打印技術(shù)就可以生產(chǎn)出來,從而生產(chǎn)周期短,生產(chǎn)和使用成本低,通用性更強(qiáng)。

人機(jī)交互
供稿:蘭慧文


