新國大蘇研院李正國教授團(tuán)隊(duì)在《自然》子刊發(fā)表新成果

新加坡國立大學(xué)蘇州研究院(以下簡稱“新國大蘇研院”)李正國(Chengkuo Lee)教授團(tuán)隊(duì)在國際頂尖學(xué)術(shù)期刊《自然?通訊》(《Nature Communications》)上發(fā)表科研成果。該項(xiàng)成果通過整合自供電的摩擦電納米發(fā)電機(jī)傳感技術(shù)、基于機(jī)器學(xué)習(xí)的數(shù)據(jù)分析以及數(shù)字孿生技術(shù),成功實(shí)現(xiàn)了面向未來無人工廠的智能軟體機(jī)器手系統(tǒng)。
近日,李正國(Chengkuo Lee)教授團(tuán)隊(duì)與上海大學(xué)田應(yīng)仲教授團(tuán)隊(duì)以及哈爾濱工業(yè)大學(xué)侯緒研副教授團(tuán)隊(duì)合作,通過整合自供電的TENG傳感技術(shù)、基于機(jī)器學(xué)習(xí)的數(shù)據(jù)分析以及數(shù)字孿生技術(shù),成功實(shí)現(xiàn)了面向未來無人工廠的智能軟體機(jī)器手系統(tǒng)(見圖1)。在該研究中,研究團(tuán)隊(duì)先設(shè)計(jì)了一種基于齒輪結(jié)構(gòu)的摩擦電長度傳感器(L-TENG),為檢測柔性手指的彎曲變形提供了一種低成本、自供電、高精度的感知方案。此外,通過在柔性硅橡膠上進(jìn)行排列式的電極設(shè)計(jì),研究團(tuán)隊(duì)提出一種可用于檢測接觸位置和接觸面積的摩擦電觸覺傳感器(T-TENG),從而實(shí)現(xiàn)了對軟體機(jī)器手的觸覺狀態(tài)的感知。將上述兩種摩擦電傳感器件集成到3D打印的軟體機(jī)器手上,并使用機(jī)器學(xué)習(xí)的分析方法進(jìn)行數(shù)據(jù)融合和特征提取,幫助柔性機(jī)器手成功實(shí)現(xiàn)了對不同抓取物體的識別,并具有極高的準(zhǔn)確率(98.1%)。而后,融合數(shù)字孿生系統(tǒng),并結(jié)合基于物聯(lián)網(wǎng)的數(shù)據(jù)傳輸技術(shù),使得提出的智能柔性手系統(tǒng)可以快速地識別真實(shí)空間中所抓取的物體,并將實(shí)際的判讀和運(yùn)動信息映射到虛擬空間,適用于未來無人倉儲和無人工廠的智能監(jiān)測和管理。該研究結(jié)果為機(jī)器人感知、摩擦納米發(fā)電機(jī)等相關(guān)研究提供了新思路,也為軟體機(jī)器人在多維信息融合的智能制造和智能分揀中的應(yīng)用提供了一種全新的解決方案。
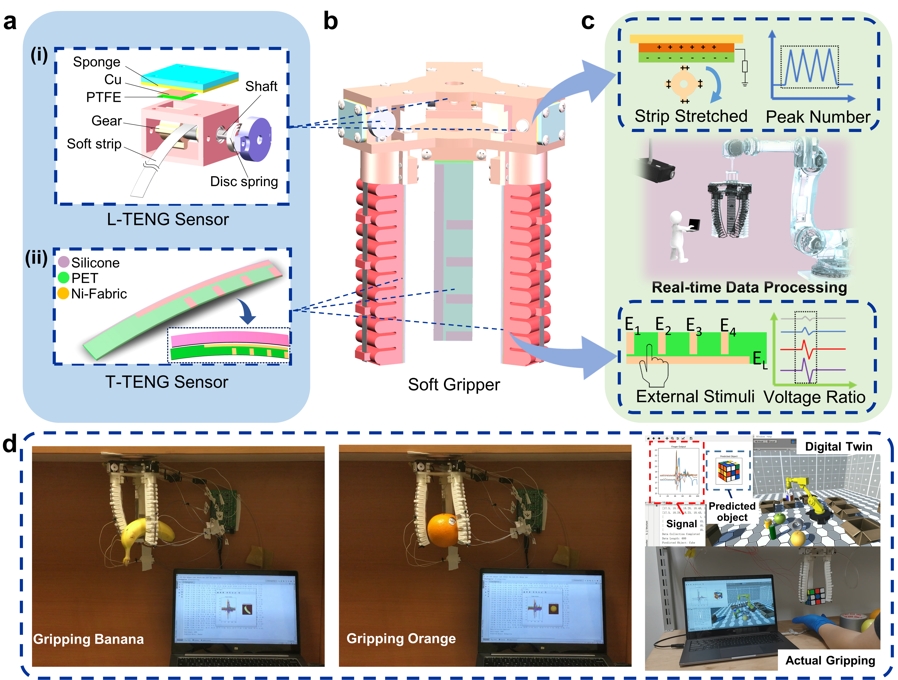
圖1:面向數(shù)字孿生的智能軟體機(jī)器手系統(tǒng):智能柔性手系統(tǒng)布局,包括傳感器結(jié)構(gòu)、安裝位置和工作機(jī)理;基于智能柔性手系統(tǒng)的實(shí)時(shí)信號處理、物體判別以及數(shù)字孿生系統(tǒng)等。圖片來源:Nat. Commun.
新國大蘇研院的科研工作聚焦前沿技術(shù),與產(chǎn)業(yè)發(fā)展強(qiáng)關(guān)聯(lián),與蘇州工業(yè)園區(qū)及地方科技深融入,開展原創(chuàng)性、應(yīng)用性研究,已建立環(huán)境與能源納米科技、先進(jìn)智慧醫(yī)療技術(shù)、大健康生物與食品工程、人工智能研發(fā)與育成卓越研究中心,旨在通過產(chǎn)業(yè)化用科技賦能區(qū)域創(chuàng)新升級。目前,研究院承擔(dān)各項(xiàng)科研項(xiàng)目100余項(xiàng),在國際著名期刊發(fā)表了700余篇有影響力的科研論文,其中1篇發(fā)表在Nature母刊,10篇發(fā)表在Nature子刊。


